Photoelectric Sensors Classification Guide
Photoelectric Sensors Classification Guide
Classification by Sensing Method
1) Through-beam Sensors
Sensing Method
The Emitter and Receiver are installed opposite each other to enable the light from the Emitter to enter the Receiver. When a sensing object passing between the Emitter and Receiver interrupts the emitted light, it reduces the amount of light that enters the Receiver. This reduction in light intensity is used to detect an object.

The sensing method is identical to that of Through-beam Sensors and some models called Slot Sensors are configured with an integrated Emitter and Receiver.
Features
Stable operation and long sensing distances ranging from several centimeters to several tens of meters.
Sensing position unaffected by changes in the sensing object path.
Operation not greatly affected by sensing object gloss, color, or inclination.
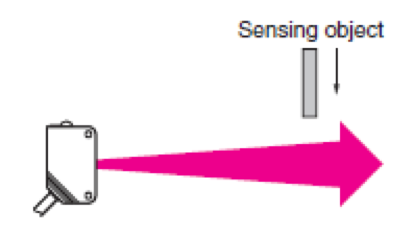
2) Diffuse-reflective Sensors
Sensing Method
The Emitter and Receiver are installed in the same housing and light normally does not return to the Receiver. When light from the Emitter strikes the sensing object, the object reflects the light and it enters the Receiver where the intensity of light is increased. This increase in light intensity is used to detect the object.
Features
Sensing distance ranging from several centimeters to several meters.
Easy mounting adjustment.
The intensity of reflected light and operating stability vary with the conditions (e.g., color and smoothness) on the surface of the sensing object.
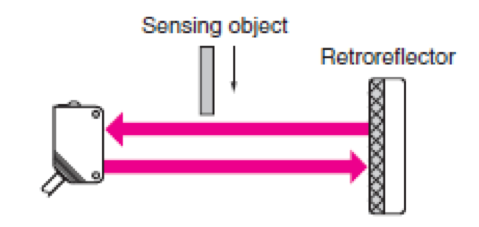
3) Retro-reflective Sensors
Sensing Method
The Emitter and Receiver are installed in the same housing and light from the Emitter is normally reflected back to the Receiver by a Reflector installed on the opposite side. When the sensing object interrupts the light, it reduces the amount of light received. This reduction in light intensity is used to detect the object
Features
Sensing distance ranges from several centimeters to several meters.
Simple wiring and optical axis adjustment (labor saving).
Operation not greatly affected by the color or angle of sensing objects.
Light passes through the sensing object twice, making these Sensors suitable for sensing transparent objects.
Sensing objects with a mirrored finish may not be detected because the amount of light reflected back to the Receiver from such shiny surfaces makes it appear as though no sensing object is present.
This problem can be overcome using the MSR function.
4) Distance-settable Sensors
Sensing Method
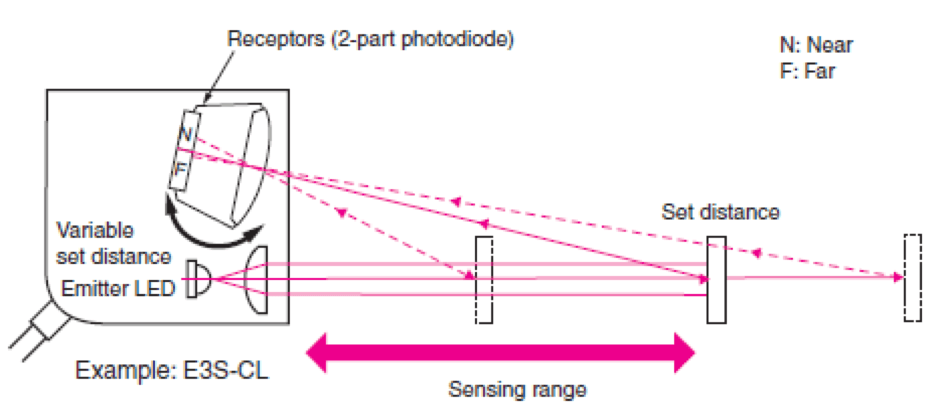
The Receiver in the Sensor is either a 2-part photodiode or a position detector. The light reflected from the sensing object is concentrated on the Receiver. Sensing is based on the principle of triangulation, which states that where the beam is concentrated depends on the distance to the sensing object.
The following figure shows a detection system that uses a 2-part photodiode. The end of the photodiode nearest the case is called the N (near) end and the other end is called the F (far) end. When a sensing object reaches the preset position, the reflected light is concentrated midway between the N end and the F end and the photodiodes at both ends receive an equal amount of light. If the sensing object is closer to the Sensor, then the reflected light is concentrated at the N end. Conversely, the reflected light is concentrated at the F end when the sensing object is located farther than the preset distance. The Sensor calculates the difference between the light intensity at the N end and F end to determine the position of the sensing object.
Features of Distance-settable Sensors
Operation not greatly affected by sensing object surface conditions or color.
Operation not greatly affected by the background.
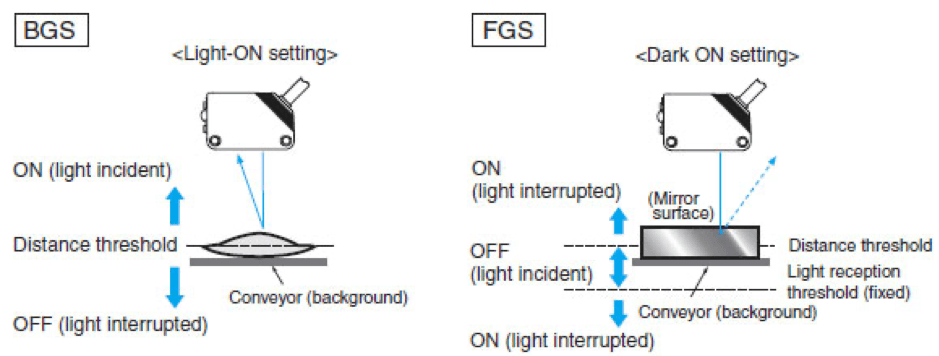
BGS (Background Suppression) and FGS (Foreground Suppression)
When using the E3Z-LS61, E3Z-LS66, E3Z-LS81, or E3Z-LS86, select the BGS or FGS function to detect objects on a conveyor belt.
The BGS function prevents any background object (i.e., the conveyor) beyond the set distance from being detected.
The FGS function prevents objects closer than the set distance or objects that reflect less than a specified amount of light to the Receiver from being detected. Objects that reflect less than a specified amount of light are as follows:
(1)Objects with extremely low reflectance and objects that are darker than black paper.
(2)Objects like mirrors that return virtually all light back to the Emitter.
(3)Uneven, glossy surfaces that reflect a lot of light but disperse the light in random directions.
Reflected light may return to the Receiver momentarily for item (3) due to sensing object movement. In that case, an OFF delay timer or some other means may need to be employed to prevent chattering.
Features
Small differences in height can be detected (BGS and FGS).
The effects of sensing object color are minimized (BGS and FGS).
The effects of background objects are minimized (BGS).
Sensing object irregularities may affect operation (BGS and FGS).
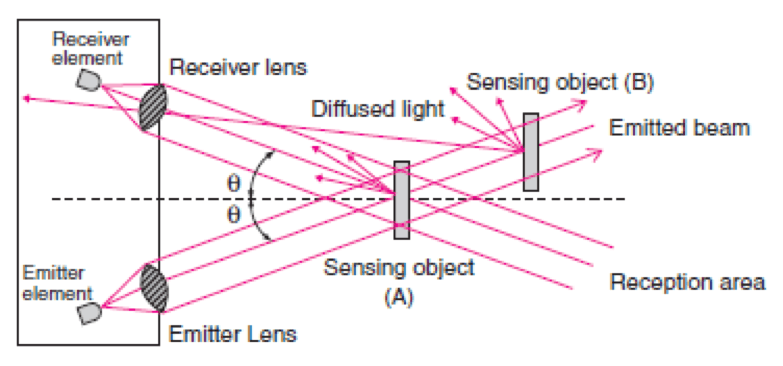
5) Limited-reflective Sensors
Sensing Method
In the same way as for Diffuse-reflective Sensors, Limited-reflective Sensors receive light reflected from the sensing object to detect it. The Emitter and Receiver are installed to receive only regular-reflection light, so only objects that are a specific distance (area where light emission and reception overlap) from the Sensor can be detected. In the figure on the right, the sensing object at (A) can be detected while the object at (B) cannot.
Images and information belongs to Omron. All rights reserved by Omron.
Shop for Photoelectric Sensors
-
 Limited Reflective, Sensing Distance White Paper 50 X 50 Mm: 5 To 30 Mm, Dark-ON, NPN, Pre-wired Models (2 M), M2 Mounting, Red LED (650 Nm)
Limited Reflective, Sensing Distance White Paper 50 X 50 Mm: 5 To 30 Mm, Dark-ON, NPN, Pre-wired Models (2 M), M2 Mounting, Red LED (650 Nm)Omron
SKU: OM_E3T-1012A
Model: E3T-SL22 2M
SGD $181.09 -
 Diffuse-reflective, Sensing Distance White Paper 100 X 100 Mm: 3 To 50 Mm, Light-ON, NPN, Pre-wired Models (2 M), Infrared LED (870 Nm)
Diffuse-reflective, Sensing Distance White Paper 100 X 100 Mm: 3 To 50 Mm, Light-ON, NPN, Pre-wired Models (2 M), Infrared LED (870 Nm)Omron
SKU: OM_E3T-1384H
Model: E3T-CD11 2M
SGD $200.17 -
 Through-beam Type, Sensing Distance 500 Mm, Light-ON, NPN, Pre-wired Models (2 M), M2 Mounting, Red LED (650 Nm)
Through-beam Type, Sensing Distance 500 Mm, Light-ON, NPN, Pre-wired Models (2 M), M2 Mounting, Red LED (650 Nm)Omron
SKU: OM_E3T-1007E
Model: E3T-FT11 2M
SGD $115.57 - Through-beam Type, Sensing Distance 500 Mm, Dark-ON, NPN, Pre-wired Models (2 M), M2 Mounting, Red LED (650 Nm)
Omron
SKU: OM_E3T-1008C
Model: E3T-FT12 2M
SGD $115.57





















Share this article on social media